
Overview
Hazard Mapping System Fire and Smoke Product
Product Information
GOES Active Fire Detection Data
NOAA's Geostationary Operational Environmental Satellite (GOES) provides 5min observations over the Conterminous U.S. (CONUS imaging sector) and 10min observations over the entire western hemisphere (full-disk imaging sector) with two satellites positioned at 75.2°W (GOES- 16 – launched on November/2016) and 137.2°W (GOES-17 – launched on March/2018).
MoreVIIRS Active Fire Detection Data
The NOAA/NASA Visible Infrared Imaging Radiometer Suite (VIIRS) was launched onboard the S-NPP polar satellite on October/2011, followed by NOAA-20 - the first of the Joint Polar Satellite System (JPSS) series - on November/2017. Each instrument provides global wall-to- wall coverage every 12h or less around 1:30am/pm local time.
MoreMODIS Active Fire Detection Data
NASA's Earth Observing System (EOS) Moderate Resolution Imaging Spectroradiometer (MODIS) can be found onboard the Terra and Aqua satellites launched on December/1999 and May/2002, respectively. Together, they provide sub-daily global observations around 10:30am/pm and 1:30am/pm local time.
MoreAVHRR Active Fire Detection Data
NOAA's Advanced Very High Resolution Radiometer (AVHRR) has, for nearly four decades, been an integral part of the NOAA suite of polar environmental monitoring satellites.
MoreHazard Mapping System
NOAA/NESDIS Satellite Analysis Branch's Hazard Mapping System (HMS) was first implemented in 2002 in response to high demand for active fire and smoke information over North America.
MoreVIIRS Fire Data Statistics
Cumulative fire data statistics are calculated daily for all 50 U.S. states using science-quality data from a combination of Aqua/MODIS 1km
MoreHMS Smoke Data Statistics
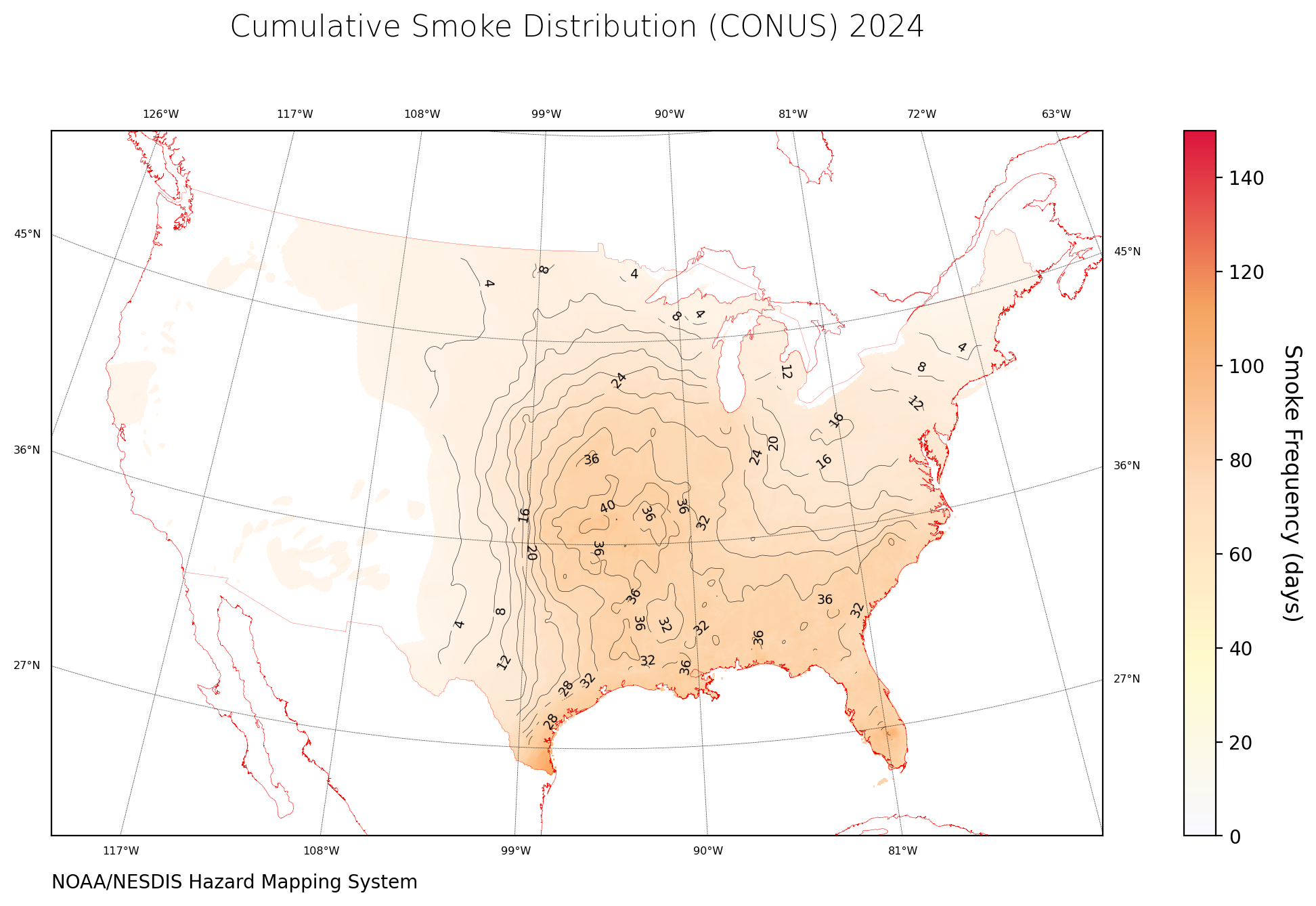
Cumulative smoke data annual statistics are derived by aggregating daily Hazard Mapping System (HMS) smoke polygons into a 0.05° grid and counting the number of days when individual cells were covered by either light, moderate or thick smoke during the year.
More
FAQ
Fire detection point data describe the center latitude/longitude coordinates of the corresponding satellite pixel in which a potential fire event was detected. The exact location of a fire may differ depending on the spatial resolution of the data set from which the fire detection pixel originates, with spatial offsets typically ranging from 10s-100s m (e.g., VIIRS data) up to +1 km (e.g., GOES data). Fire pixels detected over mountain ranges and/or steep terrain can also show larger locational errors that can be introduced by terrain correction procedures normally applied to satellite geolocation data.
HMS fire and smoke data products are marked with the time stamp representing the corresponding satellite image acquisition (observation) time in Universal Time Coordinated (UTC), and date using the Julian day calendar () (0-365 day of year for regular years, 0-366 for leap years). In order to obtain U.S. Eastern, Central, Mountain and Pacific times, users must subtract 5, 6, 7, 8 hours from UTC time, respectively (4, 5, 6, 7 hours respectively, when daylight saving time is in effect).
There isn’t an absolute size above which one can expect a fire detection from satellites. Fire detection is largely a function of spatial resolution, with coarser data sets typically requiring larger and/or more intense fires for a successful detection compared to higher spatial resolution ones that can resolve smaller and/or less intense fires. With that being said, traditional satellite fire detection algorithms currently used with the MODIS, VIIRS and GOES fire products begin to respond to active fires occupying a relatively small fraction (≥ 0.01 %) of the pixel footprint (assuming an average fire temperature of ≥ 800 K). For example, a fire must have an active area ≥ 100m2 to enable detection by a satellite pixel with an effective resolution of 1km. Increasing satellite view angles (or distance between the fire and the satellite sub-point or image center line) will lead to pixel area enlargement, effectively degrading the spatial resolution of the data and requiring larger fire areas for detection. Other factors can also affect detection performance and contribute to omission errors, including obscuration by terrain and/or forest canopies, clouds, and proximity to water bodies where the land/water separation by the algorithm may be imperfect. Meanwhile, smoke is usually transparent in the mid-infrared spectrum used in fire detection although thick and/or vertically developed smoke plumes (e.g., pirocumulus) can be confused with clouds during daytime observations causing potential omission errors.
Fire pixels do not translate into absolute fire area and their use should serve as a coarse indicator only. Due to the same reasoning described in FAQ-2 above, a fire detection can be produced for fires occupying small fractional areas of the pixel. In fact, only in relatively rare occasions will a fire occupy the entire footprint of a pixel (those cases are typically reserved to large wildfires). As a result, use of the pixel area to estimate fire size could produce gross overestimation of the actual perimeter.
Commission errors may be observed in the satellite fire products due to ambiguity between actively burning fires and other image features predominantly found during the sunlit part of the day. Those occurrences are typically associated with fresh burn scars and sandy soils that can cause an elevated signal in the mid-wave infrared (MIR) channel data. Other false alarm instances may be associated with Sun glint occurrence over optically bright and/or specular surfaces (e.g., large solar panel clusters or metallic rooftops, clouds, and water bodies). Users must also note that thermal anomalies linked to industrial activities (e.g., steel mills, gas flaring) and structural fires in urban environment may be present in these data. Such occurrences are normally removed from the quality-controlled Hazard Mapping System product.
There have been a number of cases involving large and intense wildfires over which tall plumes carrying large volumes of hot material into the air were formed when the VIIRS 375 m product detected the surface fire along with part of the plume. Those occurrences typically share the following set of conditions:
- Nighttime detection: this is the period during which the VIIRS product is particularly responsive to heat sources thereby favoring plume detection;
- Very large wildfires undergoing explosive growth accompanied by rapid/vertically elongated plume development. Enough hot material must entrain the plume creating a distinguishable thermal signal (i.e., one that significantly exceeds the fire-free surface background)
- High view angle: this is what will ultimately produce the detections extending beyond the actual fire perimeter. The parallax effect causes the tall/super-heated plume detection pixel(s) to be displaced laterally when projected onto the ground. Displaced pixels will be located on the fire perimeter’s side further away from the image center and closer to the swath’s edge.
HMS image analysts will try and identify these cases and take the appropriate action to correct the output fire data. Users working independently with VIIRS fire detection product are encouraged to look for alternative observations from previous/next satellite overpasses acquired closer to nadir whenever confronted with suspicious fire pixels matching the description above.
FRP describes a fire pixel attribute available with most operational satellite fire detection products these days that is directly related to the rate of biomass consumption during the active (flaming/smoldering) phase of a fire. It is a form of sub-pixel fire characterization that can be used as input for direct/indirect fire emissions calculations as well as in support of fire management applications. The highest FRP values in a fire perimeter will potentially indicate the most active/intense segments of the fire, where relatively high rates of energy release are found. With that being said, fuel, weather and overall observation conditions will influence absolute FRP values therefore caution should be exercised when using that parameter. For example, a pixel’s FRP value of 50 MW in a small grassland burn could be associated with the most intense segment of that fire whereas it may describe the lowest intensity part of a large wildfire.
Satellite fire detection products are defined as Level 2 data, therefore relying on the upstream Level 1 radiance files for processing. Level 1 data latency varies greatly between geostationary and polar orbiting system. GOES full disk Level 1 data become available within ~20-30 min from the actual observation, whereas the smaller imaging sector covering the Conterminous United States (CONUS) is usually available within 10-15 min from observation. GOES fire data processing adds another 5-15 min to the processing time. Comparatively, polar orbiting (MODIS, VIIRS) Level 1 data become available within 1:30-2:30 h from the time of observation with fire data processing adding another 5-10min. In the case of the HMS outputs, latency can further increase by another 1-3 h on average as image analysts perform detailed data quality assessment analysis.
It really depends on the type of analysis involved in the study. HMS is a forward processing near real-time fire and smoke monitoring system using the best available satellite data at any given time. As a result, any data gap due to planned or unplanned system downtimes or other data flow interruptions will not be back-filled. Moreover, the addition and removal or satellite data sets over time can introduce large variation in system performance. For example, the implementation of S-NPP & NOAA-20 VIIRS 375 m and GOES/ABI 2 km resulted in a significant spike in the number of daily fire pixels output by the system. Similarly, smoke mapping can be greatly affected by the observation conditions (most often as a result of cloud interference) which can lead to incomplete representation of smoke coverage.
Frequency Maps - Pixel Count
Cumulative Smoke Data Statistics
Fire Data Search and Retrieval
Date Range:
Current Analysis
Important Information
The information on fire position should be used as general guidance and for strategic planning. Tactical decisions, such as the activation of a response to fight these fires and evacuation efforts, should not be made without other information to corroborate the fire's existence and location. Users should note:- The HMS fire and smoke data are produced daily. Initial active fire detections are typically published online by 8:00 AM Eastern Time and are continuously updated throughout the day as new satellite observations are received. Smoke analysis is conducted using daytime imagery from GOES satellites, with the first smoke classification available between 11:00 AM and 12:00 PM Eastern Time. A second classification is generally issued between 7:00 PM and 8:00 PM.
- Satellite sensors used to detect active fires are sensitive to both heat sources and reflected sunlight. Their detection capability depends on the sensor's spatial and temporal resolution and can be influenced by environmental factors such as cloud cover, dense smoke, forest canopy, terrain, and the fire's size or intensity at the time of observation. Some industrial heat sources (e.g., gas flares, steel mills) and highly reflective surfaces (e.g., solar panels) may generate signals similar to those from fires, though most of these are filtered out during data processing.
- The fire points shown in the product represent the center coordinates of the pixels from the satellite imagery used to detect them. The spacing between adjacent fire points is based on the spatial resolution of the satellite sensor. In some cases, the reported fire locations may be influenced by geolocation errors.
- Satellite fire detection data are visualized using a color scheme that reflects the pixel's fire radiative power (FRP), measured in megawatts (MW). Higher FRP values may indicate the most intense areas within a cluster of fire pixels at the time of observation; however, absolute values can be significantly affected by imaging conditions. A fill value of -999 is assigned when FRP data are unavailable.
Useful Links
NESDIS Products
- AerosolWatch
- VIIRS imagery and fire product global visualization
- GOES image viewer
- GOES Aerosol Smoke Products (GASP) West
- IDEA (Air Quality)
- Automated Smoke Detection and Tracking Algorithm (ASDTA) GOES-West
Fire and Smoke Related Weblinks: